| October 2022 |.
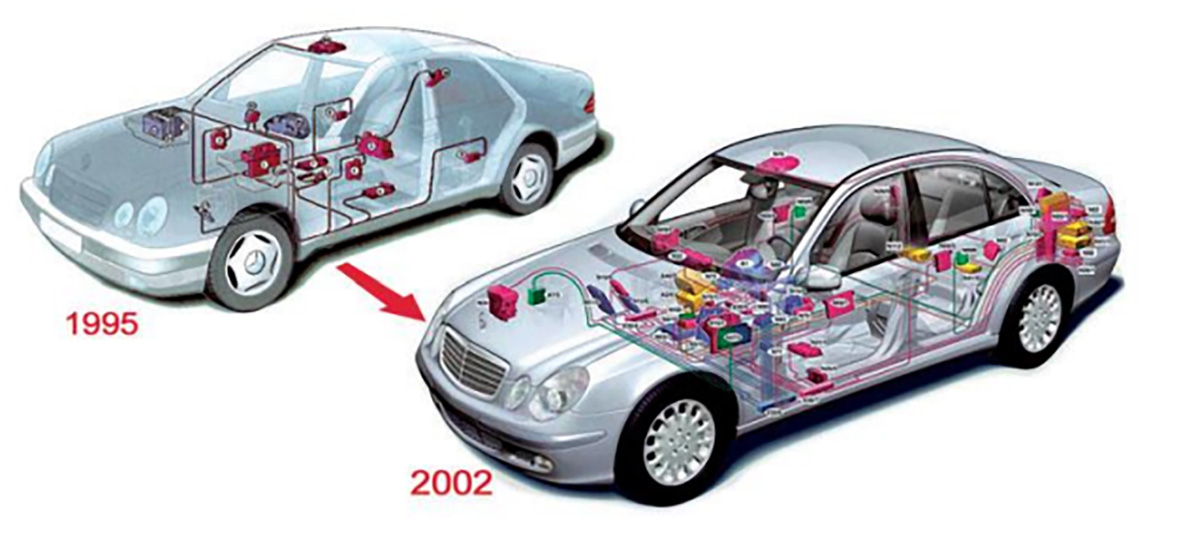
Cars from the 1990s often use a K-line. Since then, vehicles have become increasingly luxurious, safer and cleaner. Comfort became more important (seat heating, air conditioning, electrically adjustable side mirrors, etc.), but safety also expanded (ABS, tire pressure monitoring, airbags, ,lighting control). All this required more data transport via cables. In older vehicles, separate cables were incorporated into a wiring harness. But since the required wiring harnesses would become impossibly thick, today the data transport goes through the CAN bus.
CAN bus consists of two separate terms: 'CAN' is the abbreviation for Controller Area Network and a 'bus' is a thin cable, through which digital signals can be transmitted In technical terms, the Controller Area Network(CAN) is a standard for a serial data bus used to link electronic control units together. In human terms, a CAN bus system is an internal network that allows vehicle components and units to communicate with each other via messaging.
The CAN bus thus handles the data transmission of signals and controls the power consumption in the vehicle via data traffic. For this purpose, two cables twisted together and connected at the ends by a plug. Because data traffic is used, the priority between the subsystems connected to the CAN bus (e.g. engine management, temperature control systems, ABS and ESP) is controlled via a protocol. Thanks to CAN bus, the entire electronic control of all electrics to a door, for example, is controlled via two thin wires instead of a complete wiring harness.
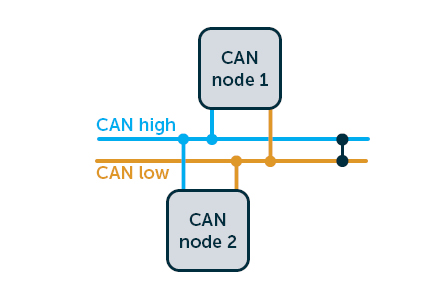
So CAN bus uses only two special wires for communication. The wires are called CAN-high and CAN-low. When the CAN bus is in idle mode, both lines carry 2.5V. When data bits are transmitted, the CAN-high line goes to 3.75V and the CAN-low goes to 1.25V, generating a 2.5V difference between the lines.
The speed is between 10kb/s and 125kb/s (depending on the system). Some applications include data connection between various control units and dashboard control.
CAN driveline: communication between most critical modules (engine control unit, ABS...) 1.
2. CAN comfort: The less critical modules (door locks, windows) are linked via this bus.
3. CAN infotainment: Navigation and audio equipment is controlled via this bus.
The CAN bus system works on the broadcast principle. A transmitter puts a message on the CAN bus. Each node on that same bus receives the message, but the sender has specified in that message for which nodes the message is intended. The nodes for which the message is intended recognize it, the rest ignore it.
A CAN network can be configured to work with two different message formats, called frames: The standard or basic frame format and the extended frame format
The only difference between the two formats is that the "CAN base frame" supports a length of 11 bits for the identifier, and the "CAN extended frame" supports a length of 29 bits for the identifier, consisting of the 11-bit identifier ("base identifier") and an 18-bit extension ("identifier extension
CAN has four frame types:
- Data frame: a frame containing node data for transmission
- External frame: a frame that requests the transmission of a specific identifier
- Error frame: a frame sent by a node that detects an error
- Frame overloading: a frame to inject a delay between data or a remote frame
Integrated CAN bus communication offers a number of benefits to industrial PC users, including:
Priority protocol - Multiple messages are normally sent simultaneously to and from all connected devices, sensors and actuators 2. Thanks to CAN's rules for evaluating messages, the highest priority message is always sent first.
Flexibility - Because of its paired structure with a single 2-wire cable, CAN bus offers increased installation and maintenance flexibility. Not only do CAN systems contain significantly fewer cables, making them easier to install, but adding new components to a system requires much less effort. In addition, complications in diagnosing and addressing signal problems are significantly reduced.
Reliability - Thanks to twisted-pair cables and LVDS (Low-voltage Differential Signaling), CAN communication is much less susceptible to electromagnetic interference than other protocols. CAN communication also requires fewer cables and connectors, significantly reducing the number of weak spots.
Cost - Lower hardware costs and minimal signal processing requirements make CAN an ideal solution for embedded applications that require multi-processor communications for which a limited budget is available.
Do you have any questions after reading this blog, or want to learn more about what works for your specific business situation? Then contact us directly by phone 03 289 55 35 or click here for more information.
After reading this blog, are you curious about which tracking and digital solutions All-Connects offers? Ask us your question and we will answer you as soon as possible.
